 |
|
|
|
Osservando da lontano una motocicletta che percorre una pista possiamo immaginarla come un corpo rigido soggetto al'azione delle forze che il piano stradale esercita nei punti di contatto degli pneumatici.
Tali forze sono governate dall'azione di controllo esercitata dal pilota: la forza di spinta tramite l'acceleratore, le forze di frenata tramite i freni; le forze verticali sono invece dipendenti dalla distribuzione dei carichi tra l'anteriore e il posteriore e dal trasferimento di carico, le forze laterali dipendono invece dall'angolo di rollio impostato e dagli angoli di deriva degli pneumatici (slittamenti laterali). Sul centro di pressione agiscono le forze aerodinamiche di resistenza e di portanza.
E' quindi evidente che la dinamica del motociclo dipende in modo preponderante dalla posizione del baricentro.
Baricentro avanzato significa forze maggiori sulla ruota anteriore, baricentro arretrato significa forze elevate sul pneumatico posteriore, baricentro alto genera grandi trasferimenti di carico nelle manovre di accelerazione e frenata, baricentro basso il contrario.
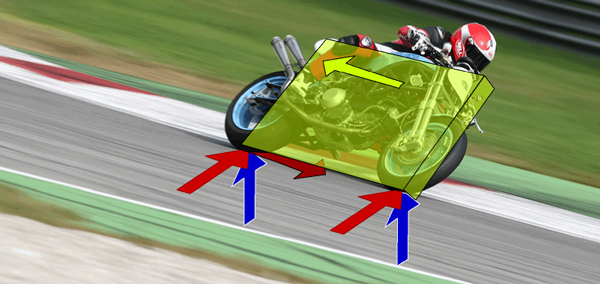
Fig. 1 Forze esterne agenti sul motociclo (motociclo Victoria a Monza).
Dove mettiamo allora il bericentro?
Per rispondere a questa domanda utilizziamo il software esclusivo messo a punto da MDRG: Xoptima.
Xoptima consente di valutate il tempo sul giro in un determinato circuito, note le caratteristiche geometriche e fisiche del motociclo, le caratteristiche degli pneumatici e del motore.
Spieghiamo brevemente come opera Xoptima.
Supponiamo di dover eseguire una certa manovra, per esempio la "S" di figura 2. A seconda di come sterziamo, ripartiamo la frenata o agiamo sull'acceleratore possiamo portare a compimento il percorso in molti modi differenti.
Tra tutte le possibili combinazioni di ingressi (sterzo, freno, acceleratore) né esisterà una sola che mi permetterà di percorrere il tracciato dato nel minor tempo possibile sfruttando al meglio le caratteristiche dinamiche e motoristiche della motocicletta, degli pneumatici e della pista (andando alla corda).
Questa manovra è chiamata appunto "manovra ottima", ed è quella che si otterrebbe facendo guidare la nostra motocicletta da un pilota ideale capace di sfruttare al massimo la geometria della pista e le potenzialità della motocicletta.
In sostanza un pilota in grado di essere sempre nelle condizioni al limite.
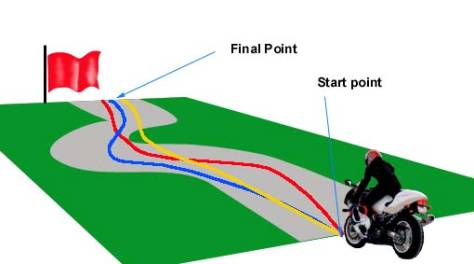
Figura 2 Disegno esplicativo del Metodo della Manovra Ottima
Con questo approccio non si definisce direttamente il pilota ideale, ma gli "obbiettivi" che si prefiggerebbe il pilota ideale per eseguire la manovra nel tempo minimo.
Il principale obbiettivo che abbiamo imposto è quello di tempo minimo, ovvero il veicolo deve correre il più possibile. Tuttavia, nel farlo deve soddisfare alcuni vincoli.
Il primo è quello di non uscire dai bordi della pista (ad esempio in figura la traiettoria gialla non è considerata).
Il secondo riguarda le forze esercitate dagli pneumatici sul piano stradale: devono rimanere all'interno dell'ellisse di aderenza. Ossia deve sfruttare al massimo le capacità di accelerazione e di frenata del motociclo anche quando il motociclo è in piega.
Realistico o solo virtuale?
Per fugare ogni dubbio sulla validità del metodo messo a punto facciamo un confronto con i dati telemetrici rilevati in pista. La figura seguente mostra il confronto con i dati sperimentali acquisiti nel circuito di Valencia (Comunidad Valenciana) da un pilota professionista della classe 125cc (2 tempi). Durante le prove si è passati da gara asciutta a bagnata così è stato possibile evidenziare le differenze della dinamica del motociclo nelle due diverse condizioni.
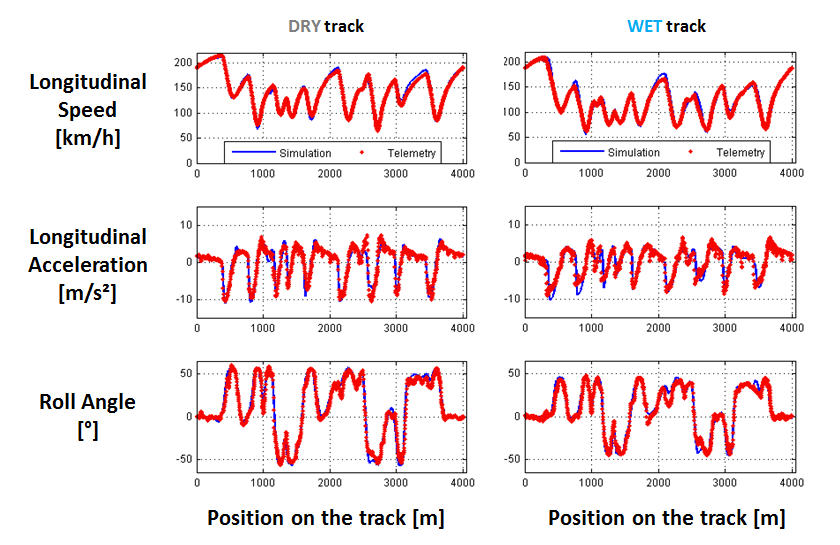
Fig.2 Confronto tra irisultati numerici e quelli sperimentali ottenuti con la telemetria. Motociclo 125cc sul circuito di Valencia .
Il confront mostra un ottimo accord tra i risultati numerici e quelli sperimentali; si può osservare che il pilota ideale è capace di adattare lo stile di guida al variare delle condizioni, in particolare al variare delle condizioni di aderenza della pista.
Con aderenze diverse le traiettorie seguite risultano leggermente diverse, diverse risultano anche le strategie di guida utilizzate. Nel grafico seguente è mostrata la forza frenante totale, nel caso di pista bagnata l'azione di frenatura inizia prima e la forza totale risulta inferiore.
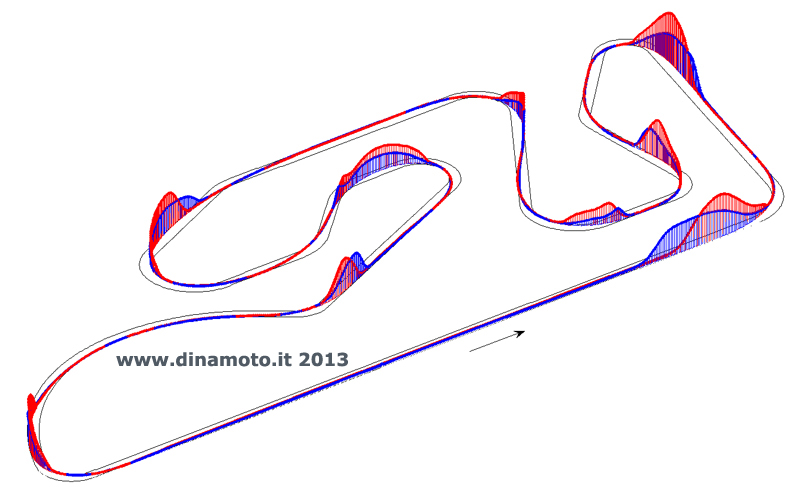
Fig.4 Confronto tra le forze di frenatura in pista bagnata (blu) ed asciutta (rossa) .
Torniamo ora alla posizione del baricentro.
La sua posizione ottimale dipende dalla tipologia del tracciato (pista veloce o lenta ),dalle condizioni di aderenza (asciutto o bagnato), e in modo non trascurabile dalla potenza del motore.
Nella figura seguente sono mostrati I tempi sul giro ottenuti sulla pista di Valencia dalla nostra motocicletta da corsa 125cc, al variare della posizione longitudinale del baricentro e della sua altezza. Con pista asciutto il tempo sul giro risulta pari a 103.9 secondi. Con pista bagnata risulta di 122.2 secondi. In entrambi I casi per ottenere un miglioramento si dovrebbe arretrare il baricentro e contemporaneamente alzarlo. Con pista asciutta conviene arretrarlo e alzarlo in eguale misura. Con pista bagnata conviene sempre arretrarlo ma alzarlo in misura minore.
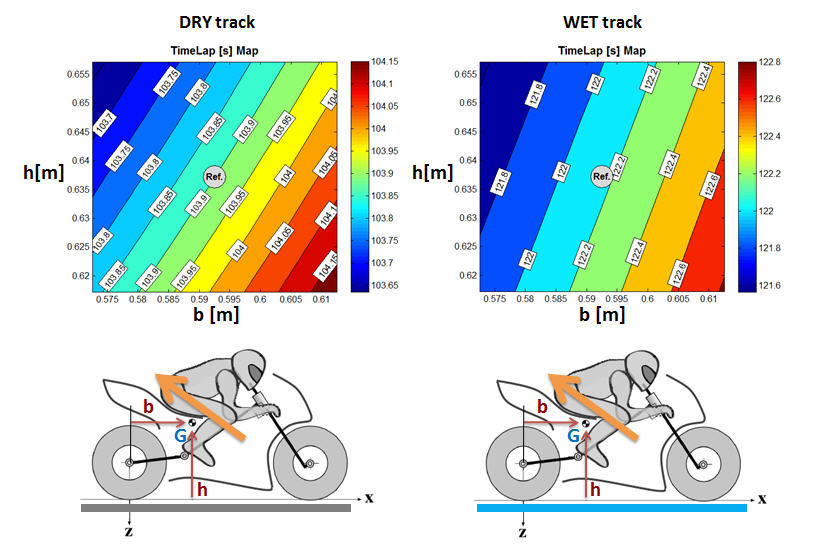
Fig.5 Tempo sul giro al variare della posizione del baricentro .
Sembrerebbe allora tutto banale, ma non lo è.
Arretrare il baricentro significa scaricare l'anteriore con la conseguenza che il pilota lo potrebbe sentire troppo leggero e pertanto non riuscire a correre al limite. Alzare il baricentro significa aumentare il trasferimento di carico, che potrebbe rendere più instabile la motocicletta durante una violenta staccata. E' pertanto necessario raggiungere un compromesso tra l'arrettramento del baricentro e l'innalzamento dello stesso con la sensibilità del pilota. Non è detto che le modifiche che permettono al pilota ideale, ma virtuale, di migliorare il tempo sul giro siano percepite nello stesso modo dal pilota reale.
Il pilota esercita le azioni di controllo del motociclo in base alle sensazioni che la moto gli trasmette attraverso il movimento delle sospensioni, nelle fasi di accelerazione e di frenata e in base anche alle sensazioni percepite di tenuta dell'avantreno e del retrotreno (legate agli angoli di deriva laterali).
Sensazioni che dipendono anche dalle rigidezze flessionali e torsionali dell'avantreno e del retrotreno.
Ma questo è un altro argomento. Quale è il comportamento dinamico ideale di un telaio?
